Eighth week
April 15, 2017 at 10:15 pm,
No comments
The laser connections were welded and some arduino tuturials were made.  Figure 1 - Welded laser
Figure 1 - Welded laser
Also the app was finished, at least the mesh creation part.
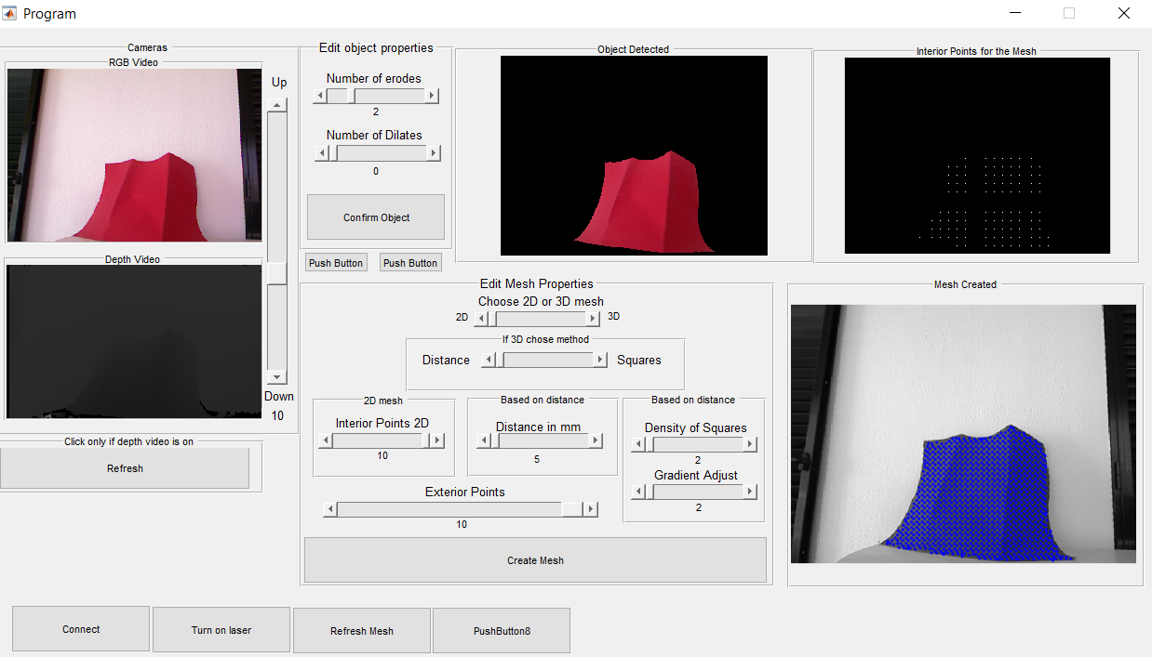 Figure 2 - Mesh using 2D
Figure 2 - Mesh using 2D
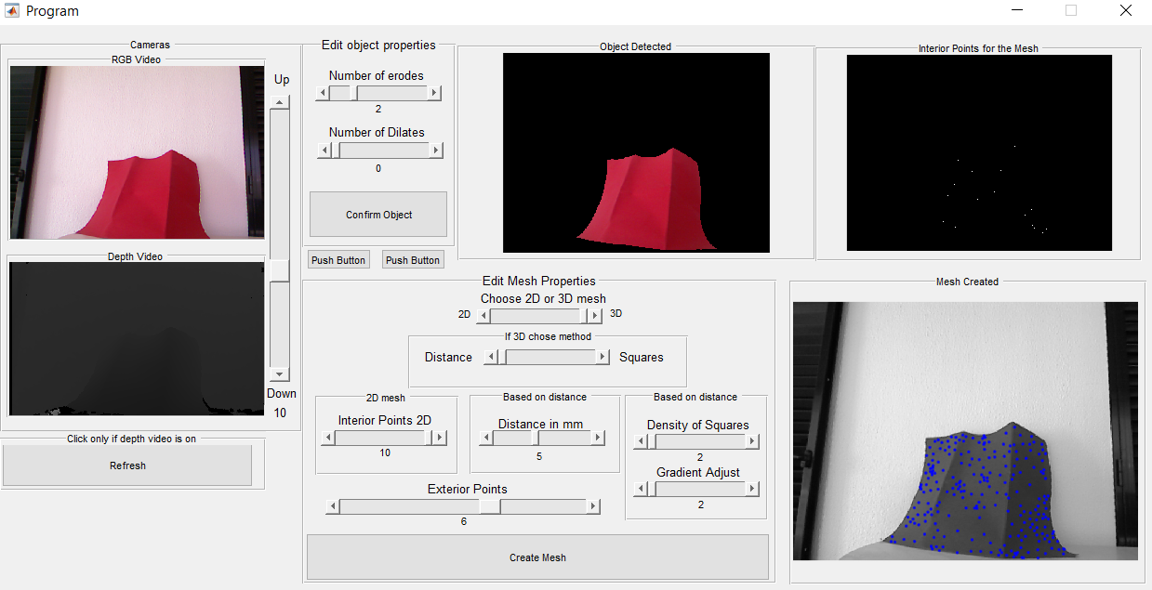 Figure 3 - Mesh using distance between points
Figure 3 - Mesh using distance between points
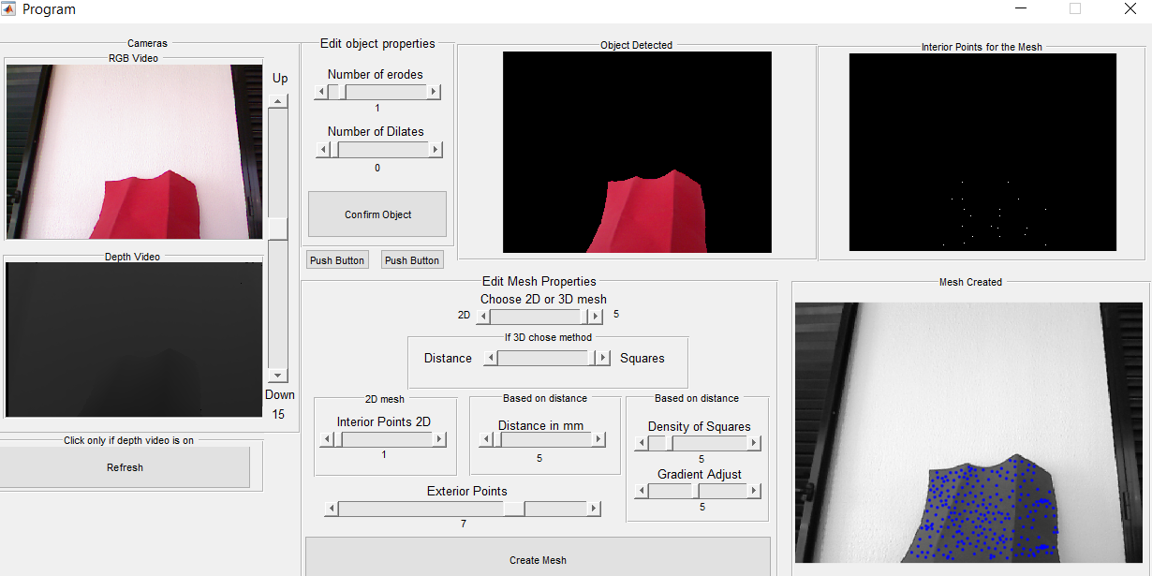 Figure 4 - Mesh using on squares
Figure 4 - Mesh using on squares
There are still tests that need to be done on a real object to validate the results.
Also the kinect limitations were study, it was found that minimum distance to the depth sensor to work is 60 cm according to link, but tests with the kinect showed that it can only capture depth if the object is at least at 80 cm.
under construction...